Non-Deterministic Finite Automata
Automata that are non-deterministic (NFA) can be in several states at once
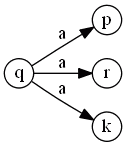
- from a state $q$ on input $a$ it can go to several different states
- this is “non-determinism”
- Deterministic Finite Automata can go only to one state in such situations
- so there are several transitions that are labeled $a$
- this is why it’s called non-deterministic
- it also has one start state and several final states
- it accepts a sequence if any of the choices lead to one of the final states
- so when there are choices where to go, a NFA tries all
Definition
Formally, a Non-Deterministic Finite Automata $A$ is a tuple $A = \langle Q, \Sigma, \delta, q_0, F \rangle$
- $Q$ is a set of states
- $\Sigma$ - input alphabet
- $\delta$ - transition functions (returns a set of transitions)
- $q_0 \in Q$ - the start state
- $F \subseteq Q$ - the final states
A string $w$ is accepted if
- $\exists p \in \delta(q_0, w): p \in F$
The language $L(A)$ of $A$
- is the set of all strings it accepts
- languages defined by NDA are also Regular Languages
Transition Function
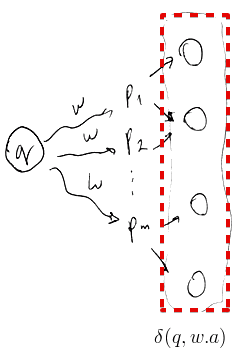
Unlike in DFAs, $\delta(q, a)$ returns a set of states
- $\delta(q, a) = { p_1, …, p_m } $
- and it can return an empty set $\varnothing$ if there’s nothing to go next
Extension to strings (i.e. Extended $\delta$) is a bit more complex than for DFA
- basis:
- $\delta(q, \epsilon) = { q }$
- the only state you can reach on empty input is the state $A$ is in
- induction
- $\delta(q, w . a) = \bigcup_{p \in \delta(q, w)} \delta(p, a)$
- i.e. union of all $\delta(p, a)$ for all $p$ reachable with a word $w$
Example 1
| 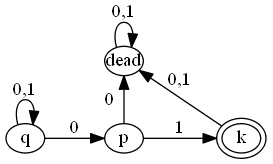 || | | | | 0 | 1 | | $\to$ | $q$ | | $ { p, q } $ | $ { q } $ | | | | $p$ | | dead | ${ k }$ | | | | $k$ | | dead | dead | | | | dead | | dead | dead |
|| | | | | 0 | 1 | | $\to$ | $q$ | | $ { p, q } $ | $ { q } $ | | | | $p$ | | dead | ${ k }$ | | | | $k$ | | dead | dead | | | | dead | | dead | dead |
- in $q$ on 0 it can stay in $q$ or go to $p$
Suppose the word is $w = 0001$

- the only possible run is $qqqpk$
But since NDA are non-deterministic
- we know it will always make a good choice
- so we don’t need “dead” transitions - we can just reject strings when there’s nothing to go next
- and we can have something like the following
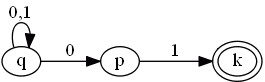 |
0 | 1 | $\to$ | $q$ | $ { p, q } $ | $ { q } $ | $p$ | $\varnothing$ | ${ k }$ | $k$ | $\varnothing$ | $\varnothing$ |
the alphabets of these two automata are the same
Example 2
- consider this chessboard of size 3 $\times$ 3
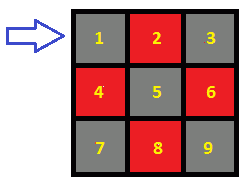
- states = squares of the chessboard
- $Q = {1, 2, 3, 4, 5, 6, 7, 8, 9}$
- $\Sigma = { r, b }$
- $r$ - “red” move: you move to any adjacent red square
- $w$ - “black” move: you move to any adjacent black square
- start state - left upper corner
- $q_0 = 1$
- final state - lower right corner
- $F = { 9}$
Consider this sequence: $rbb$
- there are many possible ways to execute this sequence
- try each

- we see that the final state is reached - so this sequence is accepted
DFA vs NFA
DFA is NFA without non-determinism
- so a DFA $A_D$ can easily be turned into an NFA $A_N$ that accepts the same language
- if $\delta_D(q, a) = p$ then let $A_N$ have $\delta_N(q, a) = { p } $
- and $L(A_D) \equiv L(A_N)$
But also for any NFA $A_N$ there exists DFA $A_D$ s.t.
- $L(A_N) \equiv L(A_D)$
- thus, NFAs also define Regular Languages
- can show that by subset construction
Subset Construction
Problem statement:
- Given NFA $A_N = \langle Q, \Sigma, \delta_N, q_0, F \rangle$
- construct DFA $A_D = \langle 2^Q, \Sigma, \delta_D, { q_0 }, F’ \rangle$ where
- $2^Q$ is a powerset of $Q$ - set of all subsets from $Q$
- input alphabet $\Sigma$
- transition function $\delta_D$
- start state ${ q_0 }$
-
finals states $F’ = { q_F \ \ q_F \in 2^Q: \exists q \in F }$
- all possible subsets of $Q$ that contain at least one state from the set of final states $F$ from NFA $A_N$
- such that $L(A_N) \equiv L(A_D)$
Note:
- states of $A_D$ have names that look like set of states (e.g. ${g_0}$ or $ {q_1, q_2, q5} $)
- however they are single objects
- this is just a naming convention to show that one state in $A_N$ may correspond to multiple states of the NFA
- so an expression like ${p, q}$ must be understood by DFA as a single symbol, not as a set
Next, we define the transition function $\delta_D$ as
- $\delta_D( \underbrace{{q_1, …, q_k}}\text{a state of DFA} , a) = \bigcup{i = 1}^k \delta_N (q_i, a)$
- so for a state ${q_1, …, q_k}$ in $A_D$ for all $q_i$ from this state
- we take a union over possible next states from $A_N$
Problem:
-
the number of states in DFA is exponential to $ Q $ - so it may also be very expensive to transform NFA to DFA
- it gets very hard to visualize
Example
Recall the chessboard NFA
|
State | $r$ | $b$ | $\to$ | 1 | ${ 2,4 }$ | ${ 5 }$ | 2 | ${ 4,6 }$ | ${ 1,3,5 }$ | 3 | ${ 2,6 }$ | ${ 5 }$ | 4 | ${ 2,8 }$ | ${ 1,5,6 }$ | 5 | ${ 2,4,6,8 }$ | ${ 1,3,7,9 }$ | 6 | ${ 2,8 }$ | ${ 3,5,9 }$ | 7 | ${ 4,8 }$ | ${ 5 }$ | 8 | ${ 4,6 }$ | ${ 5,7,9 }$ | $*$ | 9 | ${ 6,9 }$ | ${ 5 }$ |
Let’s construct a DFA for it
- we’ll do a lazy construction of DFA states:
- that is, instead of generating all elements of $A^Q$ we will add only needed ones on the go
| State | $r$ | $b$ | $\to$ | ${ 1 }$ | ${ 2,4 }$ | ${ 5 }$ | ${ 2,4 }$ | ${ 2,4,6,8 }$ | ${ 1,3,5,7 }$ | ${ 5 }$ | ${ 2,4,6,8 }$ | ${ 1,3,7,9 }$ | ${ 2,4,6,8 }$ | ${ 2,4,6,8 }$ | ${ 1,3,5,7,9 }$ | ${ 1,3,5,7 }$ | ${ 2,4,6,8 }$ | ${ 1,3,5,7,9 }$ | $*$ | ${ 1,3,7,9 }$ | ${ 2,4,6,8 }$ | ${ 5 }$ | $*$ | ${ 1,3,5,7,9 }$ | ${ 2,4,6,8 }$ | ${ 1,3,5,7,9 }$ |
The way of doing it:
- in NFA, on $r$ from state 2 we can get to ${ 4,6 }$, from 4 - to ${ 2,8 }$
- so for the DFA, on $r$ from state $ { 2,4 } $ we can go to state ${ 4,6 } \cup { 2,8 } \equiv { 2,4,6,8 }$
- we see if there’s already such state in the table - it no, we create it, otherwise use the existent one
Note that in this case it has even fewer states than the original one
- but it’s rarely the case
Proof of Equivalence
$\forall w: w \in L(A_N) \iff w \in L(A_D)$
Here we can show that
- $\forall w: \delta_N(q_0, w) \equiv \delta_D( {q_0}, w)$
- i.e. for any word $w$ we get to the same state
- (recall that $\delta_N(q_0, w)$ returns a set, and $\delta_D( {q_0}, w)$ returns a state which also can be seen as a set)
Proof by induction on $| w |$
- IH: $\delta_N(q_0, w) \equiv \delta_D( {q_0}, w)$
- basis: $w = \epsilon$
- $\delta_N(q_0, \epsilon) \equiv \delta_D( {q_0}, \epsilon) \equiv {q_0}$
- induction step
- let $w = x.a$, the IH holds for $x$ (by induction)
- let $S = \delta_N(q_0, x) \equiv \delta_D( {q_0}, x)$
- and let $T$ be $T = \bigcup_{p \in S} \delta_N (p, a)$

- then by construction of $A_D$ we see that
- $\delta_N(q_0, w) \equiv \delta_D( {q_0}, w) \equiv T$
- (refer to Subset Construction and the extension rule of NDA)
$\square$
$\epsilon$-Transitions
We can allow state-to-state transitions on empty input $\epsilon$
- these transitions are done spontaneously, without looking at the input string
- but still with these transitions we can accept only Regular Languages
NFAs with $\epsilon$-Transitions
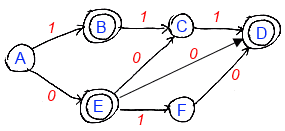
Consider this example
- the arcs labeled with $\epsilon$ can be followed at any time without taking anything from the input sequence
- in a transition table we have an additional column for $\epsilon$-transitions
- but $\epsilon$ is not an input symbol, and $\epsilon \not \in \Sigma$
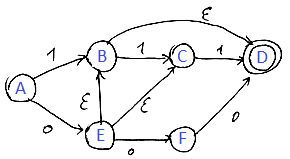 |
0 | 1 | $\epsilon$ | $\to$ | $A$ | ${ E }$ | ${ B }$ | $\varnothing$ | $B$ | $\varnothing$ | ${ C }$ | ${ D } $ | $C$ | $\varnothing$ | ${ D }$ | $\varnothing$ | $*$ | $D$ | $\varnothing$ | $\varnothing$ | $\varnothing$ | $E$ | ${ F }$ | $\varnothing$ | ${ B,C } $ | $F$ | ${ D }$ | $\varnothing$ | $\varnothing$ |
Have a look on $E$:
- there are two $\epsilon$-transitions to $B$ and $C$
- so it can go to $B$ spontaneously and then to $D$
- on input 1 it can to $B$ and there to $C$
- or to $C$ and there to $D$
- so there are quite a few nodes that are directly reachable from $E$
- this leads us to the notion of closure of $E$
Closure of States
The closure of a state $q$, denoted $\text{CL}(q)$, is
- the set of all states that you can get from $q$
- following only $\epsilon$-transitions
- in this example, $CL(E) = { B, C, D, E }$
- from $E$ you can get to $B$ and $C$, and from $B$ to $D$
- for $A$ there are no $\epsilon$-transitions, so $\text{CL}(A) = { A} $
- (on $\epsilon$ you can stay in $A$)
The closure $\text{CL}(S)$ of a set of states $S = { q_1, …, q_k }$
- is the union of closures of each $q_i$
- $\text{CL}(S) = \bigcup_{q_i \in S} \text{CL}(q_i)$
Extended $\delta$
Intuition:
- $\hat{\delta}(q_0, w)$ is the set of states that you can reach from the initial state $q_0$ following a path labeled $w$
- remember that $\epsilon$ are invisible, so in $w$ there are only real input seen by the automaton
- but spontaneously at any moment whenever possible it can follow an $\epsilon$ transition
Definition of $\hat{\delta}(q_0, w)$
- basis: $\hat{\delta}(q_0, w) = \text{CL}(q_0)$
- induction: input is $w = x.a$
- $\hat{\delta}(q_0, x) = S$ set of states reachable with $x$
- $\forall p \in S$ take the union of $\text{CL}(\delta(p, a))$
- so $\hat{\delta}(q_0, x.a) = \bigcup_{p \in \hat{\delta}(q_0, x)} \text{CL}(\delta(p, a))$
Illustration
- suppose $x \equiv bc$
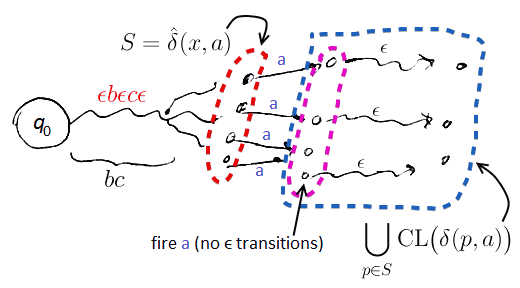
- we start from $q_0$
- then follow all $\epsilon$-transitions
- then follow $b$
- then again all $\epsilon$-transitions
- then $c$
- and again $\epsilon$-transitions
- let $S$ be the set of reachable states from $q_0$ on word $x$
- i.e. $S \equiv \hat{\delta}(q_0, x) \equiv \hat{\delta}(q_0, bc)$
- now from $S$ we fire all $a$ transitions (no $\epsilon$ yet)
- and then we take the closure of this set $S$
Example
- $\hat\delta(A, \epsilon) = \text{CL}(A) = { A } $ (the basis rule)
- $\hat\delta(A, 0) = \text{CL}({ E }) = { B,C,D,E } $
- the only place we can get from $A$ on 0 is ${ E }$
- but we close on $E$ and get to ${ B,C,D } $
- $\hat\delta(A, 01) = \text{CL}({ C,D }) = { C,D } $
- on 0 we can get to ${ B,C,D,E } $
- but only in ${ B,C } $ we can have 1
- and from ${ B,C } $ we can get only to ${ C,D } $
Language of $\epsilon$-NFA
The language of $\epsilon$-NFA is
- the set of strings $w$ s.t. $\hat\delta(q_0, w) \cap F \not \equiv \varnothing$
- i.e. it’s possible to get on $w$ to at least one of the final states from $F$
- languages defined by $\epsilon$-NFAs are also Regular Languages
Equivalence of NFA and $\epsilon$-NFA
- Every NFA is an $\epsilon$-NFA, but without $\epsilon$-transitions
- $\Rightarrow$ $\forall$ NFA $A_N$ there $\exists$ $\epsilon$-NFA $A_\epsilon$ that accepts the same language
- $L(A_N) \equiv L(A_\epsilon)$
- but showing the other way - that $\forall A_\epsilon \ \exists A_N: L(A_\epsilon) \equiv L(A_N)$ - is harder
- we need to remove $\epsilon$-transitions
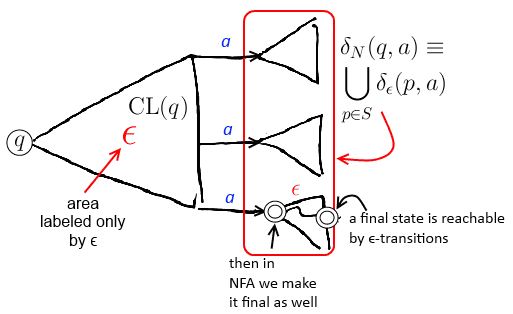
Algorithm
- given $\epsilon$-NFA $A_\epsilon = \langle Q, \Sigma, q_0, F, \delta_\epsilon \rangle$
- and an “ordinary” NFA $A_N = \langle Q, \Sigma, q_0, F’, \delta_N \rangle$
- compute $\delta_N(q, a)$ as
- let $S = \text{CL}(q)$
- and $\delta_N(q, a) = \bigcup_{p \in S} \delta_\epsilon(p, a)$
- all states that can be reaches from $q$ on $a$ and $\epsilon$ in $A_\epsilon$ (or, from $\text{CL}(q)$) in the $A_N$ can be reached only on $a$
- and define $F’$ as
- it’s a set of states $q$ s.t. $\text{CL}(q) \cap F \not \equiv \varnothing$
- if the $\epsilon$-NFA can get to a final state by following an $\epsilon$-transitions, we make such state final in the NFA as well
These construction gives an equivalent NFA
- on $w$ the NFA $A_N$ will enter the same set of states that $A_\epsilon$ would enter on $w$
-
so by induction on $ w $ need to show that $\text{CL}( \delta_N (q_0, w) ) = \hat\delta(q_0, w)$
Example
Consider again this $\epsilon$-NFA:
|
0 | 1 | $\epsilon$ | $\to$ | $A$ | ${ E }$ | ${ B }$ | $\varnothing$ | $B$ | $\varnothing$ | ${ C }$ | ${ D } $ | $C$ | $\varnothing$ | ${ D }$ | $\varnothing$ | $*$ | $D$ | $\varnothing$ | $\varnothing$ | $\varnothing$ | $E$ | ${ F }$ | $\varnothing$ | ${ B,C } $ | $F$ | ${ D }$ | $\varnothing$ | $\varnothing$ |
The equivalent NFA without $\epsilon$-transitions is the following:
 |
0 | 1 | $\to$ | $A$ | ${ E }$ | ${ B }$ | ${\color{blue}{*}}$ | $B$ | $\varnothing$ | ${ C }$ | $C$ | $\varnothing$ | ${ D }$ | $*$ | $D$ | $\varnothing$ | $\varnothing$ | ${\color{blue}{*}}$ | $E$ | ${ F }$ | ${ C, D }$ | $F$ | ${ D }$ | $\varnothing$ |
Transformation
- Here are two interesting closures:
- $\text{CL}(B) = { B, D}$
- $\text{CL}(E) = { B,C,D, E}$
- first, we need to change the transition on 1 from $E$
- $\text{CL}(E) = { B,C,D, E}$
- where we can get from these states on 1?
- to ${ C,D }$
- so we put this set for $E$ on 1
- Translation on 0 from $E$ doesn’t change
- we don’t have any transitions on 0 from ${ B,C,D, E}$
- only ${ F }$, which is already there
- Since closures of $B$ and $E$ contain the final state $D$, they also become final
Summary
- it’s possible to construct equivalent DFA NFA and $\epsilon$-NFA
- it’s also possible to convert $\epsilon$-NFAs to Regular Expressions
- all accept the same class of languages: Regular Languages
- Non-Determinism and $\epsilon$-transitions give additional power
- NFAs are easier to design than DFAs
- but only DFAs can be implemented in practice
- Computers are always deterministic
|
Sources
- Computers are always deterministic
|
- Automata (coursera)
- XML and Web Technologies (UFRT)