Cancellation Regions
Consider the following scenario:
- at each point of time the user may decide to cancel the order
- this is very difficult to express with plain Workflow Nets
- therefore in YAWL there is a special syntactic construction for that
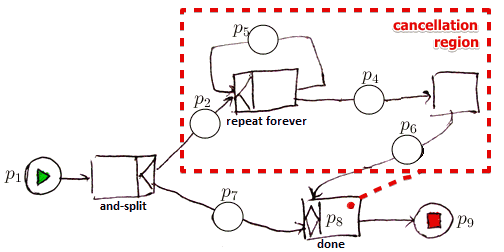
Motivation
- at the beginning we have the following

- now we need to be able to cancel the task at the bottom:
- we add a special cancel task for this that takes the token and puts it directly to the final place

- then we add more such cancel tasks

- so it quickly becomes cluttered and unreadable
Syntax
A ‘‘cancellation region’’ consists of
- a number of tasks and places
- transitions between tasks - recall that in YAWL they contain “hidden” places
- the cancellation task
Semantics
- upon completion of the cancellation task all tokens in the cancellation region are removed
- so it guarantees the proper completion property:
- it makes sure the unneeded tokes are removed and no other activity within the Cancellation Region is performed
Syntax:

- if there was something in the cancellation region when the cancellation task was activated
- it will be removed
Usage Pattern
Typical Pattern of Usage:

- there’s a cancellation place before the cancellation task
- when the job inside the cancellation region is done, ‘'’close case’’’ takes a token away from this place
- so the cancel task is no longer active
- but if the cancel task fires, it takes the token from the cancellation regions and finishes the case
Workflow Soundness
In Workflow Nets unboundness always means unsoundness
- but with cancellation regions it’s no longer the case
- but Reachability Graph can no longer be used to decide on soundness: it’s infinitely large now
- for that we use Coverability Graph
Examples
Booking
- a flight, hotel and car can be booked in parallel.
- if booking of all three succeeds the payment follows.
- otherwise task cancel is executed
- cancel is delayed until all three bookings succeed/fail
- if something is already booked, nothing is reverted: it remains booked
We model it the following way:
- each option can either fail of succeed, therefore for each we have two possible output places
- the waiting is modeled with OR-Join which, because of its Bus-Driver semantics, will wait for all possible tokens to come: we connect it with all fail places
- the OR-join is the cancellation task that will put the tokens out of succeeded places on activation
- if we used XOR-join instead of OR-join, then it would fire once there’s at least one token in any of the failed places

Consider a slightly different scenario:
- cancel is not delayed until everything fails/succeeds
- if there are booking tasks that have not started yet, they are canceled as well
The model above is changed a little bit:
- now we use XOR-join: one there’s a token, it fires
- and the cancellation region is expanded to include everything after the AND-split

Note that in this case the cancel task is itself a part of the cancellation region
- it’s to ensure that all tokens are removed and cancel can never fire twice
Assume it wasn’t the part of the CR

- suppose booking of hotel and car failed

- if one is fired first, then this will remove the remaining token
- but what if both tokens are already allocated and now are in the cancel task:

- it processes one token and outputs it

- but now it can fire the second time| | |
Sources
- Business Process Management (ULB)