R-Tree
This is Tree-Based Multi-Dimensional Index Structure
- Generalization of a B-Tree to multidimensional space
- Indexes ‘‘regions’’
B-Tree
In a B-Tree we can view a node as a line (1-dimensional space)
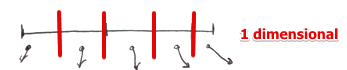
- and it divides a line into ‘‘segments’’
R-Tree
Same, but for 2D and more
- we divide data into data ‘‘regions’’
- interior nodes of an R-Tree correspond to interior region
- not data region as in B-Tree, but just a region
- A region can be of any shape, but usually it’s a rectangle or other simple shape
- A node has subregions - its children
- subregions are allowed to overlap
- but it’s usually better to keep the overlap small
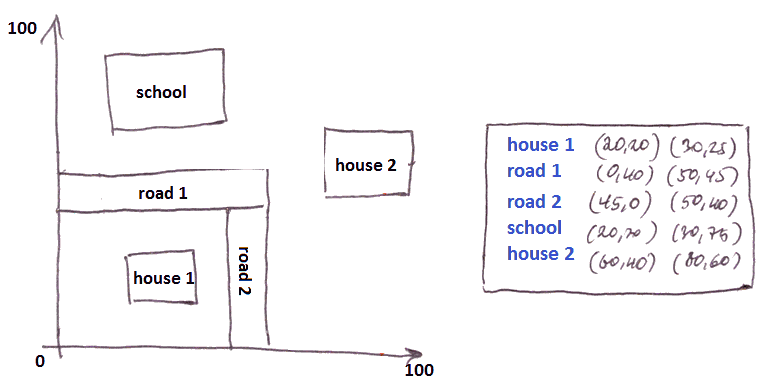
Example
Suppose we have a region
- it fits in one block
- but we insert an new object - and it no longer fits
- need to split the block into two regions
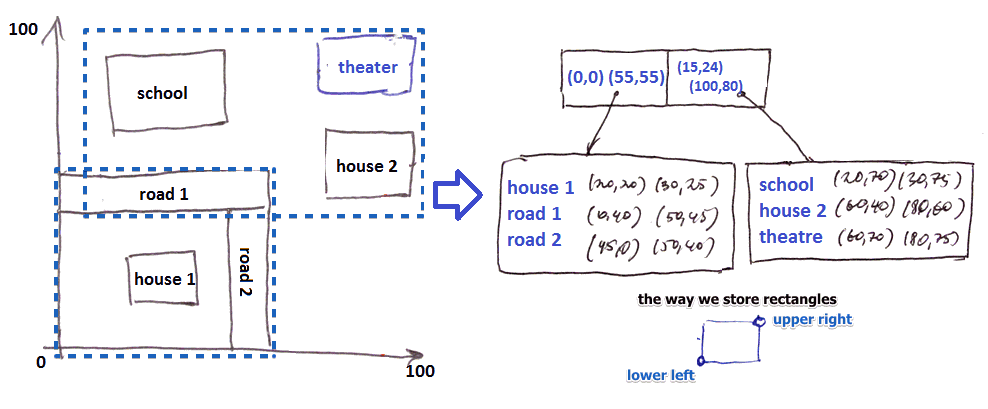
- note that (a) the blocks overlap and (b) how we represent these blocks in out database
- when we insert next time, a new object can be added to an existent block
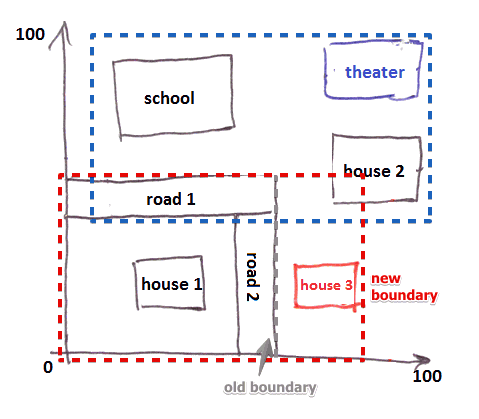
- note that we have to adjust regions boundaries to include the new object
Operations
Lookup
specify a point $P$ and ask what regions $P$ lies in (‘‘where-am-I’’ query)
- start with the root
- find which children correspond to interior regions that contain $P$
- if there are no such regions - we’re done ($P$ doesn’t belong to any region)
- if there are more than 1 region - apply recursively to each
- when we reach the leaf regions - we find the actual data regions
Insert
- start at root and try to find a region where $R$ fits
- if found: go inside and repeat
- if not: need to expand an existing region
- we want to expand as little as possible
- so we find the one that gives the smallest expansion
- when we reach a leaf, we insert $R$
- if there’s no room - we split it
- remember that we want regions to be as small as possible
- so we find the split that gives us that
- after that we insert the new subregion to the leaf’s parent
- essentially the same procedure as for B-Tree
Summary
Good for:
- Where-am-I (point) queries
- Finding intersecting regions (e.g. when a user selects an area on map)
- Partial Range queries
- Range queries
- nearest neighbor
Also
- Always balanced
- often used in practice
See also
Sources
- Database Systems Architecture (ULB)
- Database Systems: The Complete Book (2nd edition) by H. Garcia-Molina, J. D. Ullman, and J. Widom