Open Hashing Index
Idea:
- apply Open Hashing to Secondary Storage to build an index
Given:
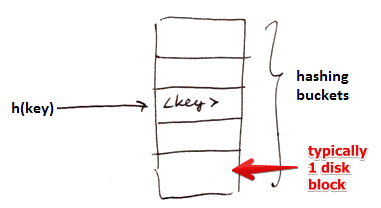
- We have $n$ hashing buckets (each bucket is typically one disk block)
- a Hash Function $h$ that maps a key $k$ to a bucket: an integers $\in [0 .. n - 1]$
Examples
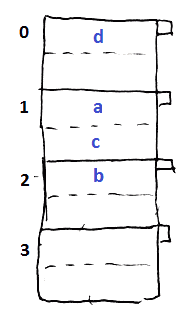
- assume we have 2 records per bucket
- hash function: $h(a) = 1, h(b) = 2, h(c) = 1, h(d) = 0$
Storing
Two options
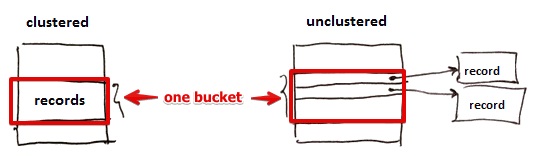
- store records themselves in the buckets (clustered index)
- store only pointers to actual records (the only option for secondary index) (unclustered index)
- also see (Clustered Index)
Do we sort records by key withing buckets
- we may if we want faster retrieval
- and inserts and deletes are not frequent (they get slower)
Overflow Blocks
We allow overflow blocks
- when we want to insert something, but there’s no room in the bucket
Operations
Lookup
- for a search key $k$ calculate $h(k)$ (apply hash function to the key)
- use the returned value to locate the bucket with our record
- if the record is not there we follow the overflow pointer
- once we’ve reached the end of chain and still haven’t found anything - there is no such record
Insert
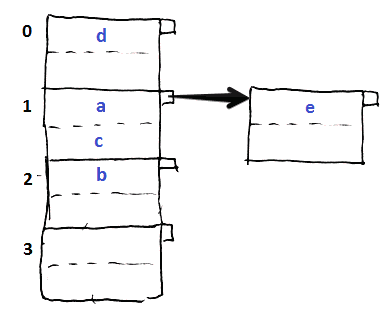
- suppose we want to insert $e, h(e) = 1$
- but bucket 1 is already full
- we create an overflow block and put it there
Algorithm
- calculate $h(k)$ to locate bucket $B$ to use
- if $B$ is not full, just add
- if $B$ is full, and there’s an overflow block, try putting it there
- otherwise create a new overflow and store this record there
’'’NB:’’’ performance degrades as the number of overflow blocks grows| see #Reorganization | |
Deletion
- for search key $k$ calculate $h(k)$ to locate the bucket $B$
- find the record in bucket $B$
- if there not there - follow the overflow pointer
- if there - remove it
- if you’re in an overflow block and this record was the last one - also remove the block
- if not last one - you may want to shift elements from other overflow blocks
Reorganization
Rule: we want to keep space utilization between 50% and 80%
'’space utilization’’ - how much space is used
- $u = \cfrac{\text{# keys used}}{\text{total # of keys}}$
- the denominator is the # of keys that we can store if we used ‘'’only’’’ main buckets, without any overflow blocks
- e.g. 2 items per block, 3 blocks = 6 keys
- if $u < 50\%$ - lots of space wasted (many empty buckets)
- if $u > 80\%$ - significant overflow
- if we go beyond the boundaries, we need to do rehashing
Rehashing: creating new buckets or eliminating wasted space
- very costly
Other Hash-Based Indexes
To be able to better cope with growth, there are other approaches:
- Dynamic Hashing:
See also
- Indexing (databases)
- http://dblab.cs.toronto.edu/courses/443/2013/06.hash-index.html